
Behavior and planning of robotic kitchen assistants
Miso Robotics
Miso Robotics
Contributed to all aspects of behavior and planning system for robotic kitchen assistants, including feature development, maintenance, deployment, processes, and tools. Main projects include but not limit to, boosting overall planning system performance; performing refactoring on the entire behavior system to improve scalability for different configurations and customer needs, leading design and development of a new fallback planner.
Links: Video
Links: Video
Apartment Package Delivery System with UAV
MRSD Capstone Project, CMU
MRSD Capstone Project, CMU
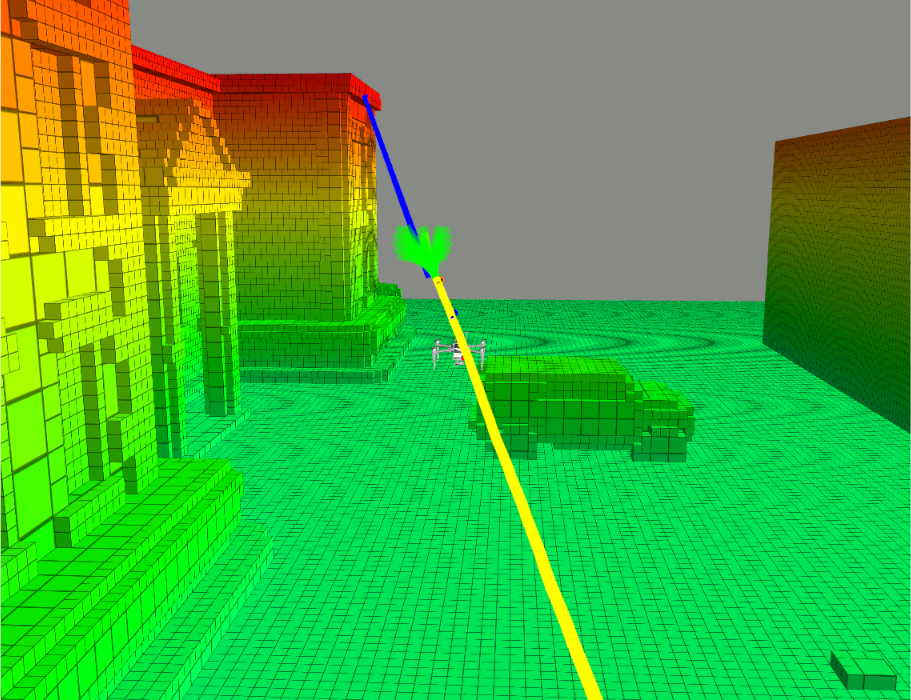
We propose a UAV apartment delivery system to extend last mile delivery solutions to individual apartments, where the flexibility of UAV movements can provide convenient and contact-less package delivery. In this project, I implemented a sampling-based global planner and a receding-horizon local planner using OMPL and OctoMap representation to generate smooth and collision-free trajectory. As a team of five, we built and integrated an end-to-end software stack(ROS/C++/Python) comprising of planning, navigation, perception & simulation modules with ability to conduct full pipeline experiments.
Links: Video, Website, Slides
Links: Video, Website, Slides
Multi-UAV motion planning for persistent coverage and surveillance
Search-Based Planning Lab, CMU
Search-Based Planning Lab, CMU
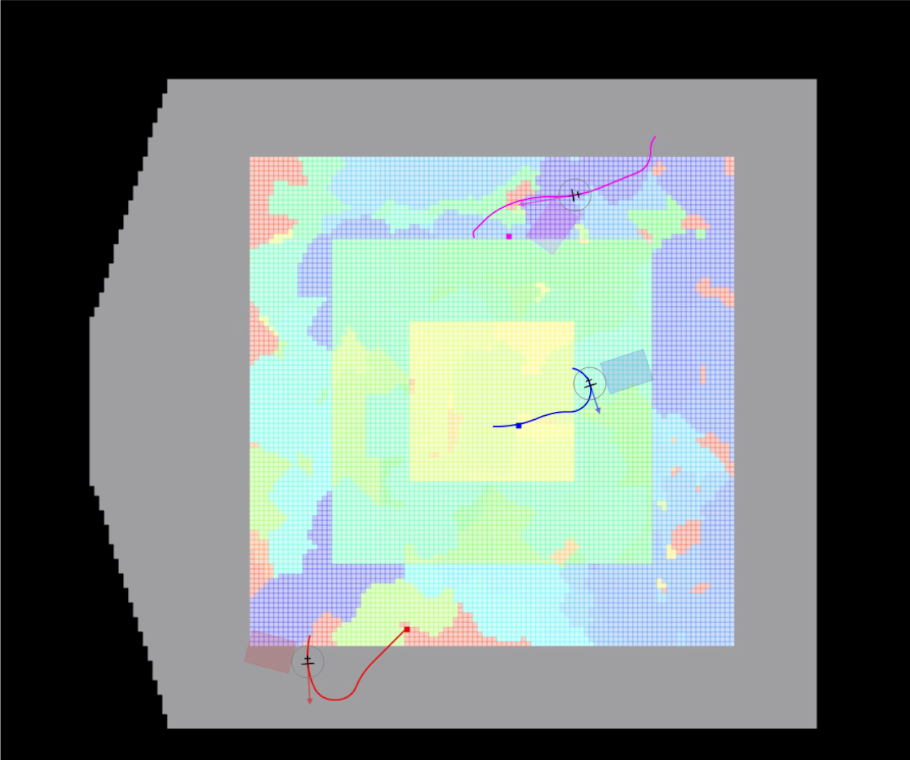
Conduct researched on multi-UAV planning with global deconfliction for persistent coverage and surveillance. In this work, I developed a new goal assigner utilizing multi-objective utility function and multi-goal A*, and also designed new motion primitives for planning using graph search(MHA*) and state lattice-based planner. I improved the coverage performance by 80% with the new goal assinger and debugging existing software pipeline.
Links: Clip
Links: Clip
Handheld Surgical Robot for Orthopedic Surgery
Robots and Medical Mechatronics Lab, NTU
Robots and Medical Mechatronics Lab, NTU
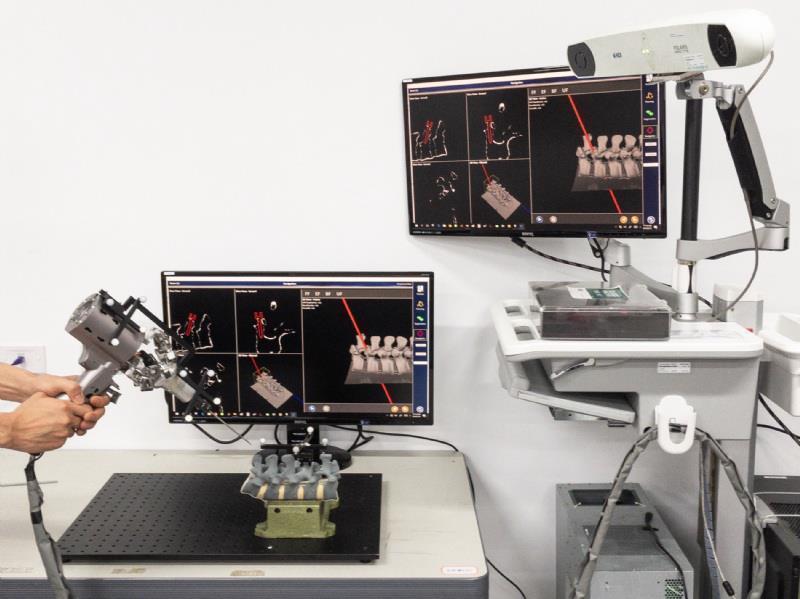
This robot is a handheld sugical robot for minimally invasive orthopedic surgery. In this project, I work on control system analysis and design. I derived inverse dynamic model and analyzed controller performance of the robot, trying to improve the tracking performance and suppress high-bandwidth tremor from the operator. We presented and demoed our robot system on national news in Taiwan, demonstrating capability of error suppression of tip motion to within 2mm.
Links: Media1, Media2(All in Mandarin)
Links: Media1, Media2(All in Mandarin)

Redundant Delta-type 5-axis milling machine
Robots and Medical Mechatronics Lab, NTU
Robots and Medical Mechatronics Lab, NTU
This redundant Delta-type robot is a research plaform in RMML, which is built as a prototype for lab's surgical robot. The robot combines a RPS parallel kinematic mechanism and an X-Y-Z stage to a gantry structure, providing larger workspace for complex shape milling. In this work, I performed system identification and designed DOB controller to improve tracking accuracy using Simulink and xPC. I also wrote some trajectory generation program to conduct the experiment.
Links: Clip
Links: Clip
Development of redundant SCARA robot
Robots and Medical Mechatronics Lab, NTU
Robots and Medical Mechatronics Lab, NTU
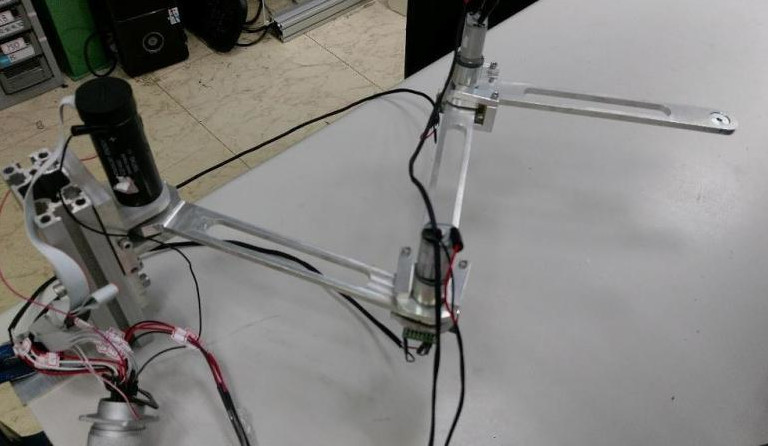
I self-proposed a College Student Research Project and gained sponsorship by Ministry of Science and Technology (Taiwan) to research on configuration space planning of redundant SCARA robot. In this project, I built the SCARA robot from scratch, including from mechanical design and manufacturing, electrical system and microcontroller, robot kinematic and dynamic analysis, to planning algorithm (RRT) simulation, as a prototype for obstacle avoidance study.